導(dǎo)三維")
導(dǎo)三維")
07
2024
-
08
"血管模型:介入手術(shù)機(jī)器人研發(fā)的引擎與驅(qū)動(dòng)力"
作者:
手術(shù)機(jī)器人已成為現(xiàn)代醫(yī)療領(lǐng)域的重要工具之一,尤其在血管介入手術(shù)中的應(yīng)用日益廣泛,導(dǎo)航系統(tǒng)通過高精度操作和實(shí)時(shí)影像反饋,極大地提高了手術(shù)機(jī)器人的精準(zhǔn)度和安全性,大幅減少了射線對介入醫(yī)生的傷害,以保護(hù)醫(yī)者安全與健康。在介入機(jī)器人研發(fā)過程中,血管模型扮演著至關(guān)重要的角色,為手術(shù)機(jī)器人的設(shè)計(jì)和優(yōu)化提供了堅(jiān)實(shí)的基礎(chǔ)。
血管模型在介入手術(shù)機(jī)器人研發(fā)中的應(yīng)用
機(jī)器人設(shè)計(jì)與優(yōu)化
血管模型為介入手術(shù)機(jī)器人的設(shè)計(jì)與優(yōu)化提供了重要的參考依據(jù)。研發(fā)團(tuán)隊(duì)利用血管模型1:1還原人體血管內(nèi)徑結(jié)構(gòu)的仿真特點(diǎn),設(shè)計(jì)更加適合血管環(huán)境的機(jī)械臂結(jié)構(gòu)、驅(qū)動(dòng)方式和控制系統(tǒng)。例如,通過模擬血管內(nèi)的狹小空間和復(fù)雜路徑,可以優(yōu)化機(jī)械臂的靈活性和精度,確保手術(shù)機(jī)器人能夠在實(shí)際手術(shù)中準(zhǔn)確到達(dá)目標(biāo)位置。此外,血管模型還可以用于測試手術(shù)機(jī)器人的導(dǎo)航和定位能力,進(jìn)一步提高手術(shù)的精準(zhǔn)度。
實(shí)驗(yàn)驗(yàn)證與性能評(píng)估
在介入手術(shù)機(jī)器人研發(fā)過程中,實(shí)驗(yàn)驗(yàn)證和性能評(píng)估是不可或缺的環(huán)節(jié)。利用血管模型進(jìn)行實(shí)驗(yàn),高度模擬真實(shí)的手術(shù)環(huán)境,評(píng)估手術(shù)機(jī)器人在各種條件下的表現(xiàn)。例如,可測試手術(shù)機(jī)器人在血管分叉處的轉(zhuǎn)向能力、在狹窄血管中的通過性以及在不同心率和血流條件下的穩(wěn)定性。這些數(shù)據(jù)為手術(shù)機(jī)器人的性能優(yōu)化提供了重要的參考依據(jù)。
遠(yuǎn)程操控與自主導(dǎo)航
隨著遠(yuǎn)程醫(yī)療和自主導(dǎo)航技術(shù)的發(fā)展,血管模型在介入手術(shù)機(jī)器人研發(fā)中的愈發(fā)重要。例如,一些研究團(tuán)隊(duì)提出了具有磁驅(qū)動(dòng)主動(dòng)轉(zhuǎn)向和自主推進(jìn)能力的磁控導(dǎo)絲機(jī)器人系統(tǒng)。這些系統(tǒng)通過外部磁場控制磁性導(dǎo)絲在血管模型內(nèi)的導(dǎo)航運(yùn)動(dòng),實(shí)現(xiàn)了對復(fù)雜血管路徑的精準(zhǔn)操控。血管模型為這些系統(tǒng)的研發(fā)提供了實(shí)驗(yàn)平臺(tái),驗(yàn)證了其在實(shí)際應(yīng)用中的可行性和有效性。
血管模型對介入手術(shù)機(jī)器人研發(fā)的價(jià)值
提高手術(shù)精準(zhǔn)度
血管模型通過模擬真實(shí)血管環(huán)境,使手術(shù)機(jī)器人在研發(fā)階段就能接受嚴(yán)格的測試和驗(yàn)證。這有助于確保手術(shù)機(jī)器人在實(shí)際手術(shù)中能夠準(zhǔn)確到達(dá)目標(biāo)位置,減少手術(shù)風(fēng)險(xiǎn),提高手術(shù)成功率。
降低研發(fā)成本
相比于人體試驗(yàn)與動(dòng)物實(shí)驗(yàn),利用血管模型進(jìn)行研發(fā)可以大大降低研發(fā)成本。另外,血管模型可以重復(fù)使用,因此也降低了實(shí)驗(yàn)材料的消耗和浪費(fèi)。
推動(dòng)技術(shù)創(chuàng)新
血管模型為介入手術(shù)機(jī)器人的技術(shù)創(chuàng)新提供了重要支撐。通過不斷優(yōu)化血管模型的設(shè)計(jì)和制作工藝,可以推動(dòng)手術(shù)機(jī)器人在導(dǎo)航、定位、感知和控制等方面的技術(shù)創(chuàng)新,進(jìn)一步提高手術(shù)機(jī)器人的性能和可靠性。
創(chuàng)導(dǎo)三維血管模型在手術(shù)機(jī)器人研發(fā)中的應(yīng)用
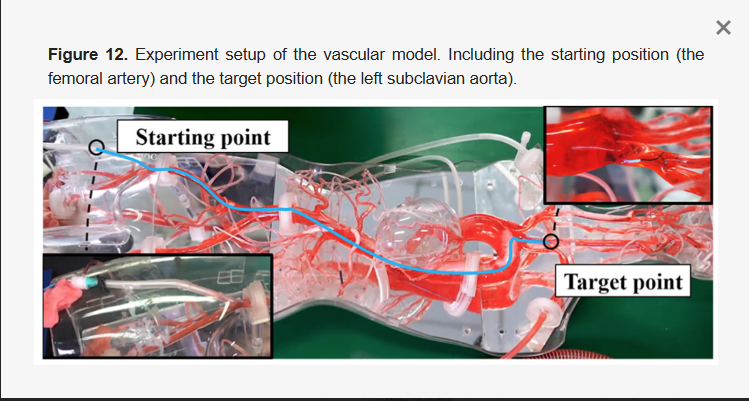
2022年北京理工大學(xué)發(fā)表論文《An Isomorphic Interactive Device for the Interventional Surgical Robot after In Vivo Study》(介入外科機(jī)器人同態(tài)交互裝置的體內(nèi)實(shí)驗(yàn)研究),論文提到的血管模擬系統(tǒng),以及可再現(xiàn)人體血液循環(huán)的,能模擬壓力、流量和溫度模擬循環(huán)系統(tǒng),均為創(chuàng)導(dǎo)三維產(chǎn)品。
研發(fā)人員以全身介入血管模型為載體,搭載介入手術(shù)器械進(jìn)行遠(yuǎn)程介入實(shí)驗(yàn),以評(píng)估所提出的主控制器在導(dǎo)管和導(dǎo)絲線性和旋轉(zhuǎn)運(yùn)動(dòng)中的操作精度。
 (圖片源自論文《An Isomorphic Interactive Device for the Interventional Surgical Robot after In Vivo Study》,如有侵權(quán)請聯(lián)系刪除)
(圖片源自論文《An Isomorphic Interactive Device for the Interventional Surgical Robot after In Vivo Study》,如有侵權(quán)請聯(lián)系刪除)
此外,創(chuàng)導(dǎo)三維還出現(xiàn)在2022年4月13日,麻省理工大學(xué)于Science Robotics發(fā)表的題為《Telerobotic neurovascular interventions with magnetic manipulation》的論文中。
詳情可點(diǎn)擊:獲麻省理工認(rèn)可 創(chuàng)導(dǎo)三維模型登上《MEDICAL ROBOTS》雜志
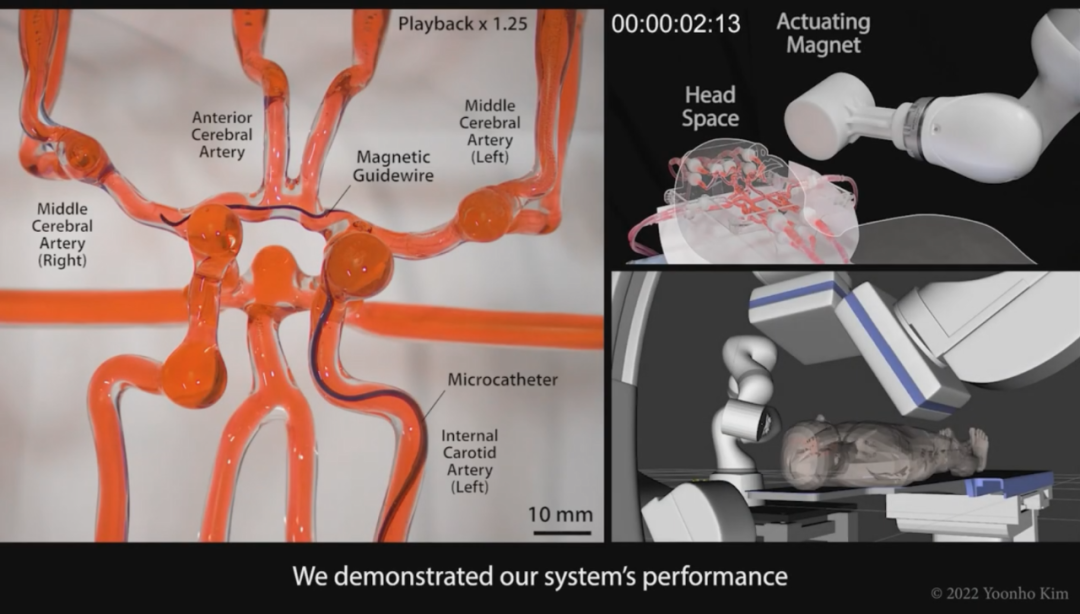
圖為麻省理工大學(xué)用創(chuàng)導(dǎo)三維神經(jīng)介入模型,進(jìn)行磁轉(zhuǎn)向和導(dǎo)航的體外演示。
(更多研發(fā)項(xiàng)目出于隱私原因,暫無法展示)
可見,血管模型在介入手術(shù)機(jī)器人研發(fā)中占有愈發(fā)重要的價(jià)值。它們不僅為手術(shù)機(jī)器人的設(shè)計(jì)和優(yōu)化提供了參考依據(jù),還通過實(shí)驗(yàn)驗(yàn)證和性能評(píng)估確保了手術(shù)機(jī)器人的精準(zhǔn)度和可靠性。手術(shù)機(jī)器人研發(fā)團(tuán)隊(duì)利用模型進(jìn)行初步測試和驗(yàn)證,確保手術(shù)機(jī)器人在復(fù)雜血管環(huán)境下的穩(wěn)定性和可靠性。
隨著醫(yī)療技術(shù)的不斷進(jìn)步和血管模型制作技術(shù)的日益成熟,血管模型將在介入手術(shù)機(jī)器人研發(fā)中發(fā)揮更加重要的作用,推動(dòng)醫(yī)療技術(shù)的不斷創(chuàng)新和發(fā)展。創(chuàng)導(dǎo)三維愿為您提供更具有仿真度的產(chǎn)品,共同促進(jìn)醫(yī)療研發(fā)事業(yè)發(fā)展。
介入手術(shù)機(jī)器人,手術(shù)機(jī)器人,力反饋,血管模型,血管介入模型,血管介入模擬系統(tǒng),血管介入模型,力反饋系統(tǒng)
二維碼
關(guān)注我們 掌握最新動(dòng)態(tài)
聯(lián)系我們
關(guān)注我們 掌握最新動(dòng)態(tài)
SAF Coolest v1.2 設(shè)置面板 JVYSS-ZJUP-FQXAE-AWW
無數(shù)據(jù)提示
Sorry,當(dāng)前欄目暫無內(nèi)容!
您可以查看其他欄目或返回 首頁





